

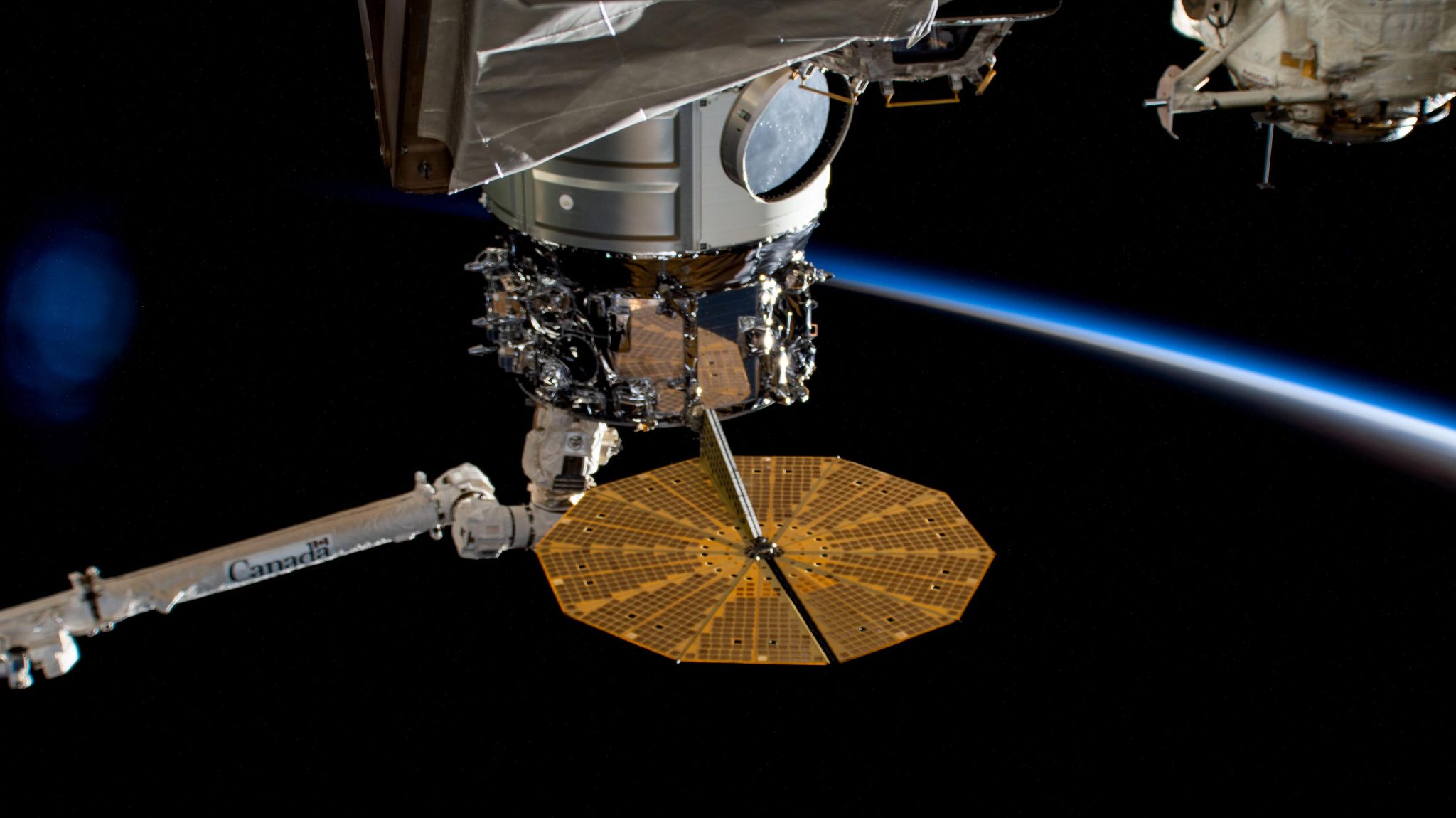
The Northrup Grumman Cygnus space freighter is pictured in the grip of the Canadarm2 robotic arm while attached to the Unity module’s Earth-facing port on April 20, 2023. The International Space Station was soaring into an orbital sunset 266 miles above the Indian Ocean in between South Africa and Antarctica at the time of this photograph. Credit: NASA
The Expedition 69 crew on the International Space Station spent a busy Friday preparing for the upcoming weekend and the Cygnus cargo spacecraft mission. Their activities included payload maintenance and relocation, a robotics practice session, hardware replacements, and inspections.
It was a jam-packed Friday for the Expedition 69 crew aboard the International Space Station. Ahead of their off-duty weekend, the crew moved payloads and stowage and two astronauts completed a second robotics practice session in preparation for next week’s cargo delivery.
” data-gt-translate-attributes=”[{[{“attribute”:”data-cmtooltip”, “format”:”html”}]”>NASA astronaut Woody Hoburg began his day collecting additional samples for the Standard Measures investigation. He then moved into the Tranquility module to clean out stowage. Later in the morning, United Arab Emirates (UAE) Flight Engineer Sultan Alneyadi joined Hoburg to assist with unstowing the NanoRacks External Platform from the NanoRacks Bishop Airlock.

NASA astronaut and Expedition 69 Flight Engineer Stephen Bowen installs student-made hardware next to the Destiny laboratory module’s Microgravity Science Glovebox to test a platform that improves the stability of cameras used to track targets on the ground or take images and video inside the International Space Station. Credit; NASA
Technical Tasks and Robotics Training
Hoburg also fixed some ethernet cables at the Astrobee docking station in the Japanese Experiment Module (JEM). He was later joined by NASA Flight Engineer Frank Rubio in the afternoon to complete a second robotics practice session for the upcoming rendezvous and capture of the Cygnus cargo spacecraft next week. Cygnus is targeted to launch on Tuesday, August 1, marking Northrop Grumman’s 19th commercial resupply mission.
After the NanoRacks External Platform was removed, Rubio captured the payload and moved it to JEM. Additionally, he and NASA astronaut Stephen Bowen removed the Multi-Purpose Experiment Platform from the Kibo airlock to be stowed and Rubio later performed a visual inspection and video survey of the airlock.
Inspections, Hardware Replacements, and Troubleshooting
In continuation of yesterday’s troubleshooting of the Glovebox Freezer, Bowen checked connections once more today. He also replaced hardware in the BioFabrication Facility, a 3D printer that investigates the feasibility of producing organ-like tissues in microgravity. Later, Bowen transitioned to the Columbus Laboratory Module to set up Kubik 5 and 6 hardware, built for automated microgravity investigations aboard the orbital lab. Wrapping up his day, Bowen performed troubleshooting on the Fluids Integrated Rack, a fluid physics research facility.
Assignments Completed by Roscosmos Crew
Finally, Roscosmos Commander Sergey Prokopyev operated the 3D printer in the Zvezda service module. Concurrently, Flight Engineer Andrey Fedyaev cleaned smoke detectors in the Zarya module and conducted computer maintenance. Flight Engineer Dmitri Petelin, wearing the sensor-pack cap, practiced piloting techniques that explore how astronauts may manage and operate spacecraft on future planetary missions.





